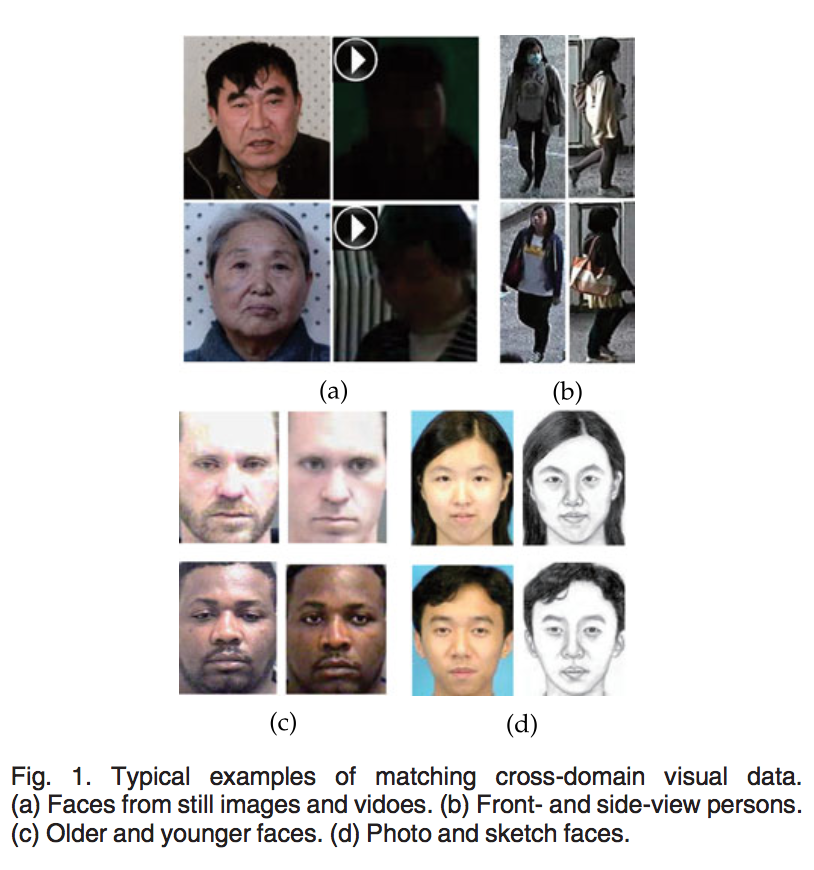
Cross-Domain Visual Matching,即跨域视觉匹配。所谓跨域,指的是数据的分布不一样,简单点说,就是两种数据「看起来」不像。如下图中,(a)一般的正面照片和各种背景角度下拍摄的照片;(b)摄像头不同角度下拍到的照片;(c)年轻和年老时的人脸照;(d)证件照和草图风格的人脸照,这些图像都存在对应关系,但由于它们属于不同的域,因此必须针对不同的域采用不同的特征提取方法,之后再做特征匹配。这篇论文提出用一种通用的相似模型来匹配两个域之间的特征,并将其和特征提取流程融合在一起,统一成一个 end-to-end 的框架。
论文动机
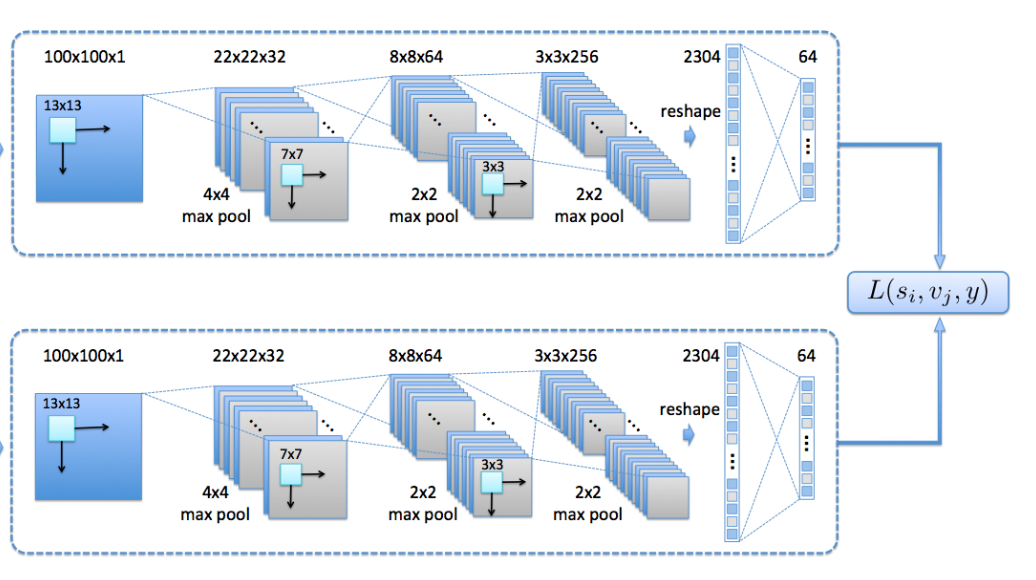
针对这种跨域图片检索,常用的方法是:先用深度学习方法提取出不同域之间的特征,然后选择一种相似度模型来度量特征之间的相似性,并以此作为网络的代价函数来训练网络参数。如下图就是一种很常用的 Siamese 网络结构:
这里说的相似模型可以是欧氏距离、余弦相似度等等。但很多时候,我们并不知道哪种相似度模型最合适。这篇论文提出了一种通用的相似度模型——一种 Affine 变换。它表明,很多相似模型都可以用这个统一的模型来表示,而这个通用的模型也可以认为是多种相似模型的综合。因此,我们与其纠结选择哪种相似度模型,不如让网络自己学习出这个通用模型的参数,让网络自己选择最适合的模型。本文的另一个贡献在于将特征的提取与相似模型的学习融合进一个统一的框架内。
论文方法
通用的相似模型
论文认为,大多数相似模型都可以归纳为如下形式: \[ \begin{align} S(\mathbf{x}, \mathbf{y})=\begin{bmatrix}\mathbf{x}^T & \mathbf{y}^T & 1 \end{bmatrix} \begin{bmatrix} \mathbf{A} & \mathbf{C} & \mathbf{d} \\ \mathbf{C}^T & \mathbf{B} & \mathbf{e} \\ \mathbf{d}^T & \mathbf{e}^T & f \end{bmatrix} \begin{bmatrix} \mathbf{x} \\ \mathbf{y} \\ 1 \end{bmatrix} \tag{1} \end{align} \] (\(\mathbf{A}\)、\(\mathbf{B}\)、\(\mathbf{C}\) 是矩阵,\(\mathbf{d}\) 和 \(\mathbf{e}\) 是两个向量,\(\mathbf{x}\) 和 \(\mathbf{y}\) 分别表示两个待匹配的向量)
举个例子,如果 \(\mathbf{A}\)=\(\mathbf{B} = \mathbf{I}\),\(\mathbf{C}=-\mathbf{I}\),\(\mathbf{d}=\mathbf{e}=\mathbf{0}\),\(f=0\),则该模型退化为欧式距离:\(S(x,y)=\mathbf{x}^T\mathbf{x}-2\mathbf{x}\mathbf{y}+\mathbf{y}^T\mathbf{y}=||\mathbf{x}-\mathbf{y}||^2\)。
同时,论文还限制 \(\mathbf{A}\)、\(\mathbf{B}\) 为半正定矩阵,表示同域内的自相关性,\(\mathbf{C}\) 为两个域之间的相关性矩阵。根据半正定矩阵的性质以及 \(\mathbf(C)\) 的对称性,我们可以将 \(\mathbf{A}\)、\(\mathbf{B}\)、\(\mathbf{C}\) 表示为: \[ \begin{align} \mathbf{A}=\mathbf{L_A}^T \mathbf{L_A} \notag \\ \mathbf{B}=\mathbf{L_B}^T \mathbf{L_B} \tag{2} \\ \mathbf{C}=-\mathbf{L_C^x}^T\mathbf{L_C^y} \notag \end{align} \] 这样,(1) 式可以展开为: \[ \begin{align} \tilde{S}(\mathbf{x},\mathbf{y})&=S(\mathbf{f_1}(\mathbf{x}), \mathbf{f_2}(\mathbf{y})) \notag \\ =& \begin{bmatrix} \mathbf{f_1}(\mathbf{x})^T & \mathbf{f_2}(\mathbf{y})^T & 1 \end{bmatrix} \begin{bmatrix} \mathbf{A} & \mathbf{C} & \mathbf{d} \\ \mathbf{C}^T & \mathbf{B} & \mathbf{e} \\ \mathbf{d}^T & \mathbf{e}^T & f \end{bmatrix} \begin{bmatrix} \mathbf{f_1}(\mathbf{x}) \\ \mathbf{f_2}(\mathbf{y}) \\ 1 \end{bmatrix} \tag{3} \\ =& \mathbf{f_1}(\mathbf{x})^T\mathbf{A}\mathbf{f_1}(\mathbf{x}) + \mathbf{f_1}(\mathbf{x})^T\mathbf{C}\mathbf{f_2}(\mathbf{y}) + \mathbf{f_1}(\mathbf{x})^T\mathbf{d} + \mathbf{f_2}(\mathbf{y})^T\mathbf{C}\mathbf{f_1}(\mathbf{x}) \notag \\ &+\mathbf{f_2}(\mathbf{y})^T\mathbf{B}\mathbf{f_2}(\mathbf{y}) + \mathbf{f_2}(\mathbf{y})^T\mathbf{e} + \mathbf{d}^T\mathbf{f_1}(\mathbf{x}) + \mathbf{e}^T\mathbf{f_2}(\mathbf{y}) + f \notag \\ =&||\mathbf{L_A}\mathbf{f_1}(\mathbf{x})||^2+||\mathbf{L_B}\mathbf{f_2}(\mathbf{y})||^2+2\mathbf{d}^T\mathbf{f_1}(\mathbf{x}) \notag \\ & -2(\mathbf{L_C^x}\mathbf{f_1}(\mathbf{x}))^T(\mathbf{L_C^y}\mathbf{f_2}(\mathbf{y}))+2\mathbf{e}^T\mathbf{f_2}(\mathbf{y})+f \notag \end{align} \] (3) 式中的 \(\mathbf{f_1}(\mathbf{x})\) 和 \(\mathbf{f_2}(\mathbf{y})\) 分别代表 \(\mathbf{x}\)、\(\mathbf{y}\) 两个样本经过提取得到的向量。这样一来,我们就将半正定矩阵等限制引入到这个度量关系中。
接下来,我们考虑如何优化这个相似模型。
假设 \(D=\{(\{\mathbf{x_i}, \mathbf{y_i}\}, \ell_i) \}_{i=1}^N\) 表示训练的数据集,\(\{\mathbf{x_i}, \mathbf{y_i}\}\) 表示来自两个不同域的样本,\(\ell_i\) 标记两个样本是否属于同一类,如果是同一类则记为 -1,否则为 1: \[ \begin{align} \ell_i=\ell(\mathbf{x_i}, \mathbf{y_i})= \begin{cases} -1 & c(\mathbf{x})=c(\mathbf{y}) \\ 1 & otherwise \end{cases} \tag{4} \end{align} \] 我们的目标是,当两个样本属于同一类时,相似度要小于 -1,否则大于 1: \[ \begin{align} \tilde{S}(\mathbf{x_i}, \mathbf{y_i})=\begin{cases} < -1 & if\ \ell_i=-1 \\ \ge 1 & otherwise \end{cases} \tag{5} \end{align} \] 基于此,论文提出如下目标函数: \[ \begin{align} G(\mathbf{W}, \mathbf{\phi})=\sum_{i=1}^N{(1-\ell_i \tilde{S}(\mathbf{x_i}, \mathbf{y_i}))_+}+\Psi (\mathbf{W}, \mathbf{\phi}) \tag{6} \end{align} \] 其中,\(\mathbf{W}, \mathbf{\phi}\) 分别表示网络参数和相似模型参数,\(\mathbf{\phi}=(\mathbf{L_A},\mathbf{L_B},\mathbf{L_C^x},\mathbf{L_C^y},\mathbf{d},\mathbf{e},f)\),\(\Psi(\mathbf{W}, \mathbf{\phi})\) 表示正则化项。
特征学习与相似度融合
接下来要解决的是如何用一个框架将特征学习与相似模型融合在一起。论文采用如下网络结构:
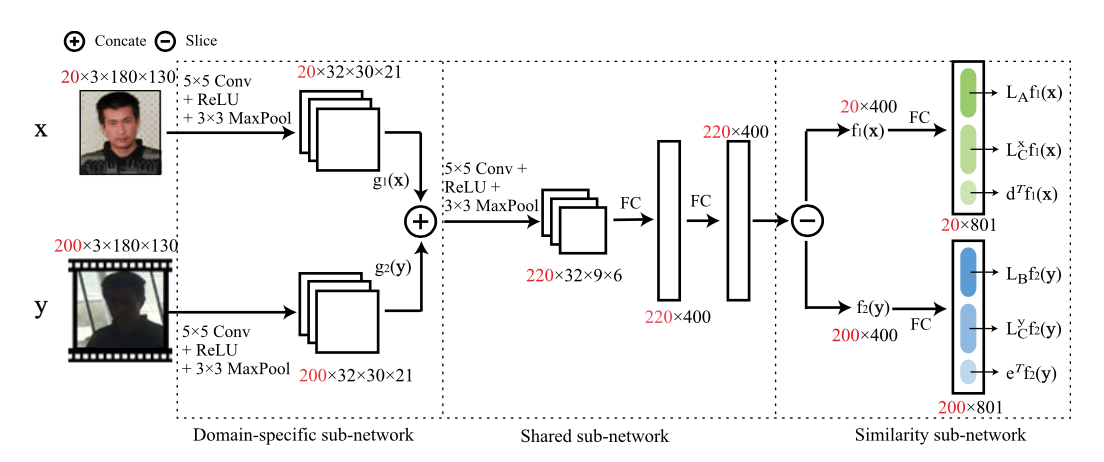
首先,我们用两个子网络分支分别提取两个不同域的图片特征,然后用一个共享的网络将两种特征融合起来,最后再用两个子网络分支计算相似模型的参数。 接下来分析一下网络训练的流程。首先,我们将网络的输出结果记为: \[ \begin{align} \tilde{x} \triangleq \begin{bmatrix} \mathbf{L_A f_1(x)} & \mathbf{L_C^x f_1(x)} & \mathbf{d}^T \mathbf{f_1(x)} \end{bmatrix}^T \notag \\ \tilde{y} \triangleq \begin{bmatrix} \mathbf{L_B f_2(y)} & \mathbf{L_C^y f_2(y)} & \mathbf{e}^T \mathbf{f_2(y)} \end{bmatrix}^T \notag \end{align} \] 为了将 \(\tilde{x}\) 和 \(\tilde{y}\) 代入 (3) 式,我们再引入三个辅助矩阵: \[ \begin{align} & \mathbf{P_1}=\begin{bmatrix} \mathbf{I}^{r \times r} & \mathbf{0}^{r \times (r+1)} \end{bmatrix} \notag \\ & \mathbf{P_2}=\begin{bmatrix} \mathbf{0}^{r \times r} & \mathbf{I}^{r \times r} & \mathbf{0}^{r \times 1} \end{bmatrix} \notag \\ & \mathbf{P_3}=\begin{bmatrix} \mathbf{0}^{1 \times 2r} & 1^{1 \times 1} \end{bmatrix}^T \notag \end{align} \] \(r\) 表示网络输出的特征维度,即 \(\mathbf{f_1}(\mathbf{x})\) 和 \(\mathbf{f_2}(\mathbf{y})\) 的维度。
借助这三个矩阵,可以得到:\(\mathbf{L_A}\mathbf{f_1}(\mathbf{x})=\mathbf{P_1}\tilde{x}\),\(\mathbf{L_B}\mathbf{f_2}(\mathbf{y})=\mathbf{P_1}\tilde{y}\) 等。
然后我们可以把 (3) 式表示为: \[ \begin{align} \tilde{S}(x,y)=&(\mathbf{P_1} \tilde{x})^T\mathbf{P_1}\tilde{x}+(\mathbf{P_1} \tilde{y})^T\mathbf{P_1}\tilde{y} \notag \\ &-2(\mathbf{P_2}\tilde{x}^T)\mathbf{P_2}\tilde{y}+2\mathbf{P_3}^T\tilde{x}+2\mathbf{P_3}^T\tilde{y}+f \notag \end{align} \] 目标函数调整为: \[ \begin{align} G(\mathbf{W}, \mathbf{\phi}; D) =&\sum_{i=1}^N{(1-\ell_i \tilde{S}(x_i,y_i))_+ + \Psi{(\mathbf{W}, \phi)}} \notag \\ =&\sum_{i=1}^N{\{1-\ell_i [(\mathbf{P_1}\tilde{x_i})^T\mathbf{P_1}\tilde{x_i} + (\mathbf{P_1}\tilde{y_i})^T\mathbf{P_1}\tilde{y_i}} - \notag \\ & {2(\mathbf{P_2 \tilde{x_i}})^T\mathbf{P_2}\tilde{y_i} + 2\mathbf{P_3}^T\tilde{x_i}+2\mathbf{P_3}^T\tilde{y_i}+f] \}}_+ + \Psi{(\mathbf{W}, \phi)} \tag{13} \end{align} \]
公式中的 \(D\) 表示训练的样本对。
训练细节优化
值得注意的是,(13) 式是一种 sample-pair-based 的表示,每次计算目标函数的时候,我们需要生成很多的样本对,而且,由于同一张图片可能出现在多个 pair 中,这样就容易造成很多重复计算(例如,计算 \(\tilde{x_1}\) 时需要一次前向传播,如果 \(x_1\) 这张图片又出现在同一个 batch 的其他 pair 中,那我们又需要计算一次前向传播,而这个计算结果其实是可以复用的)。所以,下一步是将它表示成 sample-based 的形式,以减少这种重复计算。
sample-based 的基本想法是,在每次 batch 训练时,我们不是用一个个 pair 计算,而是针对每张图片,把与该图片相关的操作都放在一起计算。 具体点说,假设一个 batch 中的数据为 \(\{\{x_1,y_1\},\dots,\{x_n,y_n\}\}\),在原始的 sample-pair-based 的算法中,我们会针对网络的两个输入计算两个导数。
对 \(\tilde{x_i}\) 而言: \[ \begin{align} \frac{\partial G(\Omega_x; D)}{\partial \Omega_x}=\sum_{i=1}^n{-\frac{\partial (\ell_i \tilde{S}(x_i,y_i))}{\partial \tilde{x_i}}\frac{\partial \tilde{x_i}}{\partial \Omega_x} + \frac{\partial \Psi}{\partial \Omega_x} } \notag \end{align} \] 对 \(\tilde{y_i}\) 而言: \[ \begin{align} \frac{\partial G(\Omega_y; D)}{\partial \Omega_y}=\sum_{i=1}^n{-\frac{\partial (\ell_i \tilde{S}(x_i,y_i))}{\partial \tilde{y_i}}\frac{\partial \tilde{y_i}}{\partial \Omega_y} + \frac{\partial \Psi}{\partial \Omega_y} } \notag \end{align} \] 在上面两个公式中,\(\Omega=\{W,\phi\}\),\(n\)表示sample的数量。不难发现,\(\frac{\partial \tilde{x_i}}{\partial \Omega_x}\) 和 \(\frac{\partial \tilde{y_i}}{\partial \Omega_y}\) 都只跟各自的输入图片有关,跟样本对中的另一张图片无关,而这一项也是重复计算的根源,所以,sample-based 的计算过程是把这两项单独提取出来,重复利用。以 \(\tilde{x_i}\) 为例: \[ \begin{align} \frac{\partial G(\Omega_x; D)}{\partial \Omega_x}=\sum_{i=1}^m{\{ \frac{\partial \tilde{x_i}}{\partial \Omega_x} \sum_{j}(-\frac{\partial (\ell_i \tilde{S}(x_i,y_j))}{\partial \tilde{x_i}})\} + \frac{\partial \Psi}{\partial \Omega_x} } \notag \end{align} \] 上式中的 \(y_j\) 表示与 \(x_i\) 组成一个 pair 的另一张图片。注意这里我们用\(m\)替换\(n\),因为现在只需要针对\(m\)张不同的图片(\(n\)个样本对中可能只有\(m\)张\(x_i\)是不同的)计算导数平均值即可。
基于上述思想,论文给出了如下更加符号化的表述。对于 \(D\) 中的每一个样本对 \(\{\mathbf{x_i},\mathbf{y_i}\}\),我们假设 \(\mathbf{z}^{j_{i,1}}=\mathbf{x_i}\),\(\mathbf{z}^{j_{i,2}}=\mathbf{y_i}\),其中,\(1 \le j_{i,1} \le M_x\),\(M_x+1 \le j_{i,2} \le M_z(=M_x+M_y)\),\(M_x\) 是样本 \(\mathbf{x}\) 的数量,\(M_y\) 是样本 \(\mathbf{y}\) 的数量。同理,\(\tilde{\mathbf{z}}^{j_{i,1}}=\tilde{\mathbf{x_i}}\),\(\tilde{\mathbf{z}}^{j_{i,2}}=\tilde{\mathbf{y_i}}\)。 然后,我们可以将 (13) 式改写成 sample-based 的形式: \[ \begin{align} G(\Omega;Z)=&L(\Omega;Z)+\Psi(\Omega) \notag \\ =& \sum_{i=1}^N{\{1-\ell_i [(\mathbf{P_1} \tilde{\mathbf{z}}^{j_{i,1}})^T \mathbf{P_1}\tilde{\mathbf{z}}^{j_{i,1}} + (\mathbf{P_1} \tilde{\mathbf{z}}^{j_{i,2}})^T \mathbf{P_1}\tilde{\mathbf{z}}^{j_{i,2}}} \notag \\ & {-2(\mathbf{P_2}\tilde{\mathbf{z}}^{j_{i,1}})^T\mathbf{P_2}\tilde{\mathbf{z}}^{j_{i,2}} + 2\mathbf{P_3}^T\tilde{\mathbf{z}}^{j_{i,1}} + 2\mathbf{P_3}^T\tilde{\mathbf{z}}^{j_{i,2}} + f] \}}_+ \notag \\ & + \Psi(\Omega) \tag{14} \end{align} \] 其中,\(\Omega=(\mathbf{W}, \phi)\)。 梯度下降的导数为: \[ \Omega=\Omega - \alpha \frac{\partial G(\Omega)}{\partial \Omega}=\Omega - \alpha ( \frac{\partial L(\Omega)}{\Omega} + \frac{\partial \Psi}{\partial \Omega}) \] 其中,\(\alpha\) 是学习率。 这里的重点是要计算 \(\frac{\partial L(\Omega)}{\partial \Omega}\): \[ \frac{\partial L(\Omega)}{\partial \Omega}=\sum_j{\frac{\partial L}{\partial \tilde{\mathbf{z}}^j}\frac{\partial \tilde{\mathbf{z}}^j}{\partial \Omega}} \] 由于存在两个子网络分支,上式中,\(\tilde{\mathbf{z}}^j=\tilde{\mathbf{z}}^{j_{i,x}}\) 或 \(\tilde{\mathbf{z}}^j=\tilde{\mathbf{z}}^{j_{i,y}}\),\(\frac{\partial \tilde{\mathbf{z}}^j}{\partial \Omega}\) 分别对应两个网络分支的导数(论文中 \(\tilde{\mathbf{z}}^{j_{i,x}}\)、\(\tilde{\mathbf{z}}^{j_{i,y}}\) 和 (14) 式中的 \(\tilde{\mathbf{z}}^{j_{i,1}}\)、\(\tilde{\mathbf{z}}^{j_{i,2}}\) 等符号混用了)。在梯度下降中,我们需要针对两个网络分支计算两次导数。 对处理 \(\mathbf{x}\) 的分支,计算得到: \[ \begin{align} \frac{\partial L}{\partial \tilde{\mathbf{z}}^{j_{i,x}}}=-\sum_{j_{i,y}}{2\ell_{j_{i,x},j_{i,y}} (\mathbf{P_1}^T\mathbf{P_1}\tilde{\mathbf{z}}^{j_{i,x}}-\mathbf{P_2}^T\mathbf{P_2}\tilde{\mathbf{z}}^{j_{i,y}}+\mathbf{P_3})} \notag \end{align} \] 这里的 \(\ell_{j_{i,x},j_{i,y}}\) 就是 (4) 式中定义的 \(\ell(\mathbf{x_i}, \mathbf{y_i})\)。 另外,有些样本可能已经具备一定的区分度了,因此训练时要剔除这些样本。论文中引入一个标识函数 \(\mathbf{1}_{\mathbf{z}^{j_{i,x}}}(\mathbf{z}^{j_{i,y}})\),当 \(\ell_{j_{i,x},j_{i,y}}\tilde{S}(\mathbf{z}^{j_{i,x}},\mathbf{z}^{j_{i,y}})<1\) 时「由 (5) 式可知,此时 \((\mathbf{z}^{j_{i,x}},\mathbf{z}^{j_{i,y}})\) 还达不到要求的区分度」,\(\mathbf{1}_{\mathbf{z}^{j_{i,x}}}(\mathbf{z}^{j_{i,y}})=1\),否则为 0。于是,得到最终的导数公式: \[ \frac{\partial L}{\partial \tilde{\mathbf{z}}^{j_{i,x}}}=-\sum_{j_{i,y}}{2\mathbf{1}_{\mathbf{z}^{j_{i,x}}}(\mathbf{z}^{j_{i,y}})\ell_{j_{i,x},j_{i,y}} (\mathbf{P_1}^T\mathbf{P_1}\tilde{\mathbf{z}}^{j_{i,x}}-\mathbf{P_2}^T\mathbf{P_2}\tilde{\mathbf{z}}^{j_{i,y}}+\mathbf{P_3})} \tag{18} \] 对于另一个分支,我们可以用同样的方法计算 \(\frac{\partial L}{\partial \tilde{\mathbf{z}}^{j_{i,y}}}\)。
最后,把 (18) 式代回到 (17) 式,就可以得到 sample-based 的梯度公式。
论文给出了计算公式 (18) 的具体执行算法:
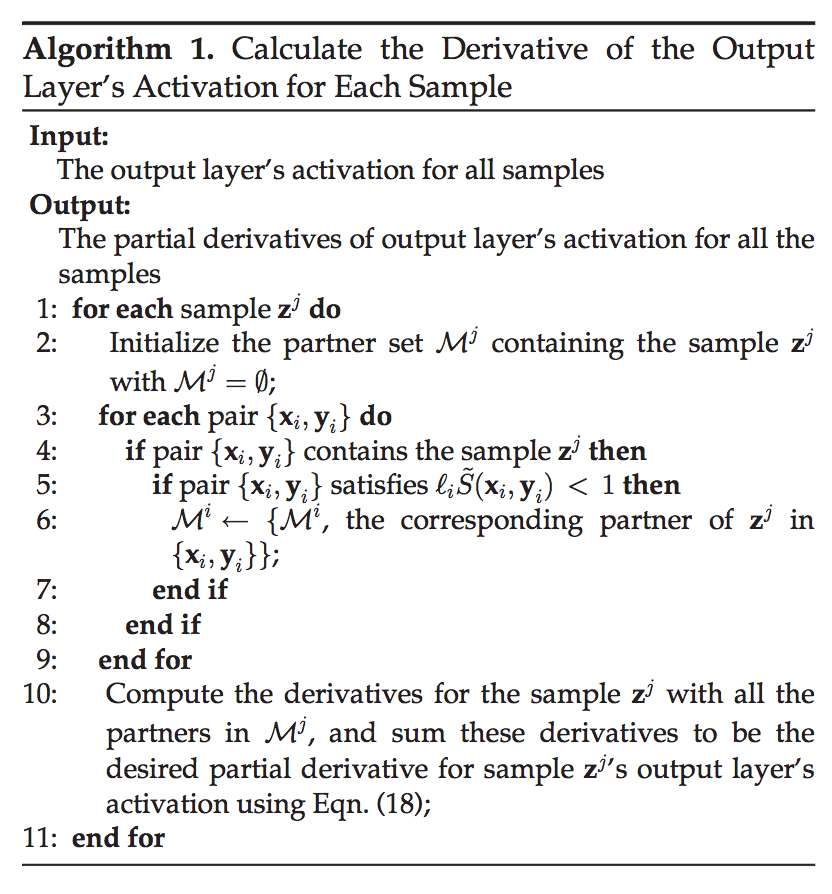
这个算法总结起来就是,对于每张输入图片 \(\mathbf{z}^j\),收集跟它组成 pair 的所有图片,按照公式 (18) 计算 \(\frac{\partial L}{\partial \tilde{\mathbf{z}}^j}\)。
下面给出的是完整的梯度下降算法:
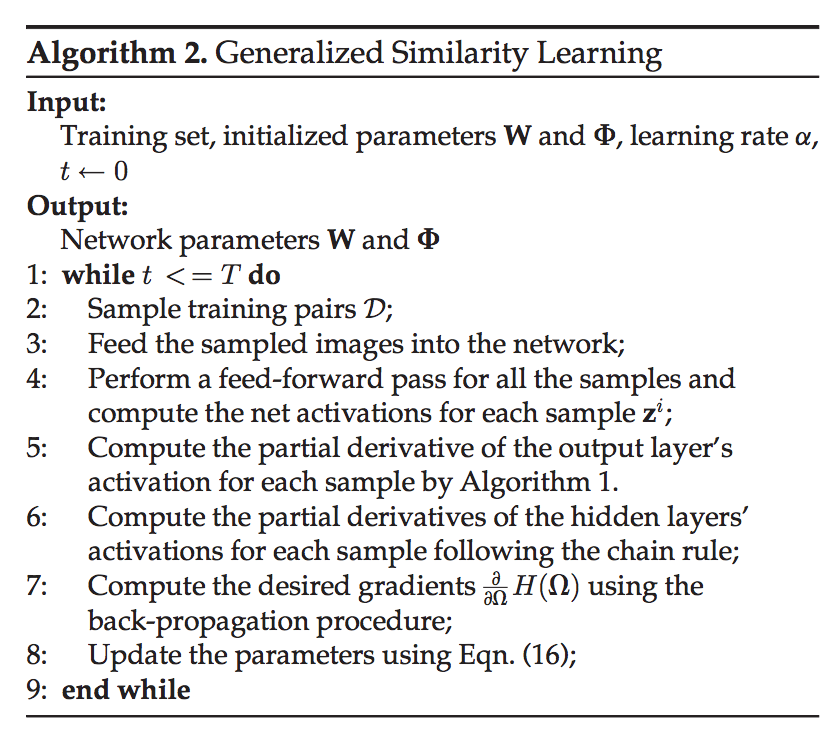
注意到,对于每次迭代训练的 batc h数据,算法中会将每张图片前向传播和后向传播的计算结果都保存下来,然后再针对之前提及的 sample-based 的方法计算梯度。因此,相比 sample-pair-based 的形式,我们实际上只需要对每张图片计算一次前向和后向即可,节省了大量重复计算。
样本生成
最后,在训练样本对的生成上,论文采用如下方法: 每次迭代时,先随机挑选 K 个目录(每个目录都包含两个不同的域),然后从每个目录的两个域中,分别随机挑选 \(O_1\) 和 \(O_2\) 张图片。接着,对第一个域中的每张图片 \(A\),从第二个域中随机挑选若干图片和它组成样本对,注意,从第二个域中挑选的图片,有一半和 \(A\) 属于同一目录,另一半与 \(A\) 属于不同目录。