相比 2D 中的旋转变换,3D 中的旋转变换复杂了很多。关于 2D 空间的旋转,可以看这篇文章。本文主要粗略地探讨一下 3D 空间中的旋转。
旋转的要素
所谓旋转要素就是说,我们只有知道了这些条件,才知道怎么旋转一个物体。回忆 2D 空间中的旋转,我们需要确定旋转中心、旋转角以及旋转方向才能旋转一个图形。以此类推,到了 3D 空间,我们仍然需要确定三个要素:一个旋转轴、旋转角以及旋转方向。 下面,为了讲解的方便,旋转方向默认为:正对旋转轴正方向,按逆时针方向为旋转正方向,反之为旋转负方向。
旋转的几种情况
3D 中的旋转本质上可以分为下面三类情况: 1. 绕 x / y / z 轴旋转; 2. 绕通过原点的直线旋转; 3. 绕不通过原点的直线旋转。
可能有同学不理解为什么要分这么多情况讨论,其实这是一个将复杂的问题简单化的过程。在旋转 2D 空间中的物体时,我们也只是计算出绕原点旋转的公式,然后将旋转点平移到跟原点重合,再根据公式旋转物体,最后再平移回去。其实完全可以计算出一个绕任意轴旋转的通用公式,但那样会导致计算量更大。
绕 x / y / z 轴旋转
这是最简单的旋转情况,只要把 2D 中的旋转延伸到 3D 空间就可以了。
绕 x 轴旋转
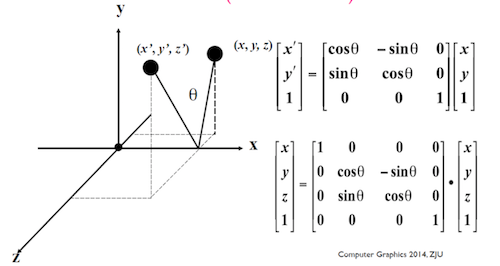 上图是一个绕 x 轴旋转的图示。假设我们需要从点(\(x, y, z\))绕 x 轴旋转 \(\theta\) 角到点 (\(x^{'}, y^{'}, z^{'}\)),那么,旋转过程中,x 的坐标值始终都是固定不变的,因此,我们可以把它当作是在\(x=x^{'}\)这个平面上进行旋转,从而退化成一个 2D 旋转的问题。 上图右边的两个矩阵,上面那个是 2D 旋转矩阵,而底下那个只是把该矩阵延伸到 3D 空间而已(为了将平移也纳入矩阵运算,3D 的变换都是采用齐次坐标)。因为 x 轴是旋转轴,因此实际上是在 yoz 平面上做 2D 旋转。只要你知道 2D 空间那个旋转矩阵怎么计算,3D 的变换只是依葫芦画瓢而已。
上图是一个绕 x 轴旋转的图示。假设我们需要从点(\(x, y, z\))绕 x 轴旋转 \(\theta\) 角到点 (\(x^{'}, y^{'}, z^{'}\)),那么,旋转过程中,x 的坐标值始终都是固定不变的,因此,我们可以把它当作是在\(x=x^{'}\)这个平面上进行旋转,从而退化成一个 2D 旋转的问题。 上图右边的两个矩阵,上面那个是 2D 旋转矩阵,而底下那个只是把该矩阵延伸到 3D 空间而已(为了将平移也纳入矩阵运算,3D 的变换都是采用齐次坐标)。因为 x 轴是旋转轴,因此实际上是在 yoz 平面上做 2D 旋转。只要你知道 2D 空间那个旋转矩阵怎么计算,3D 的变换只是依葫芦画瓢而已。
绕 y 轴旋转
同理,这里不再赘述。 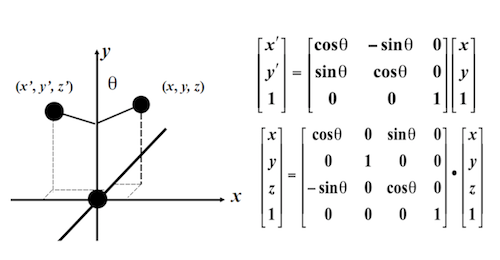
绕 z 轴旋转
同理,这里不再赘述。 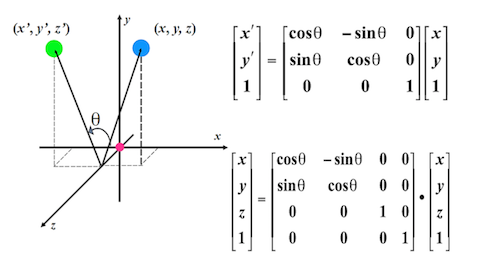
绕通过原点的直线旋转
以下所引用的例子来自文末链接三维空间中的旋转:旋转矩阵、欧拉角
现在,假设我们要绕旋转轴 \(P\) 旋转 \(\theta\) 角(如下图所示),那又该如何? 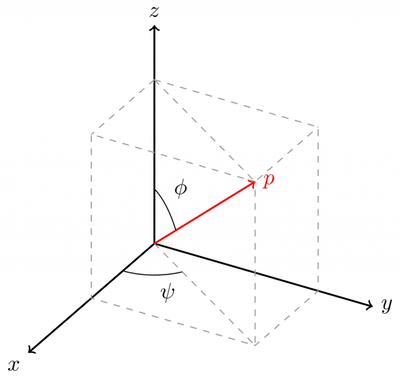 目前我们已有的工具只是绕 x / y / z 轴旋转的矩阵而已。回想 2D 中绕任意点旋转的情况,我们是将任意点变换到原点,绕原点旋转后,再变换回原来的位置。所以,同样的道理,这次我们也将绕 \(P\) 轴的旋转分解为三步(跟原文例子的解释稍有不同,但本质上是一样的):
目前我们已有的工具只是绕 x / y / z 轴旋转的矩阵而已。回想 2D 中绕任意点旋转的情况,我们是将任意点变换到原点,绕原点旋转后,再变换回原来的位置。所以,同样的道理,这次我们也将绕 \(P\) 轴的旋转分解为三步(跟原文例子的解释稍有不同,但本质上是一样的):
- 将 \(P\) 轴旋转到与 z 轴重合,此时物体跟着旋转到新位置;
- 让物体绕 z 轴旋转 \(\theta\) 角(可以直接套用之前的矩阵);
- 将物体逆向旋转回原来的位置。
下面就针对这三步,解释一下具体的操作。
(1) 首先是将旋转轴旋转到与 z 轴重合。为此,我们需要将 \(P\) 轴绕 z 轴旋转 \(\psi\) 角(根据前面的声明,这里是正方向)。因此,需要乘以矩阵: \[ R_z(\psi)=\begin{bmatrix} cos\psi & -sin\psi & 0 & 0 \\ sin\psi & cos\psi & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \] 旋转完后,\(P\) 轴落入 xoz 平面,然后,按照同样的思路,绕 y 轴旋转 \(\phi\) 角,再乘以矩阵: \[ R_y(\phi)=\begin{bmatrix} cos\phi & 0 & -sin\phi & 0 \\ 0 & 1 & 0 & 0 \\ sin\phi & 0 & cos\phi & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \] 这时,\(P\) 轴与 z 轴已经重合了。
(2) 然后我们让物体绕 z 轴旋转 \(\theta\) 角: \[ R_z(\theta)=\begin{bmatrix} cos\theta & -sin\theta & 0 & 0 \\ sin\theta & cos\theta & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \] (3) 最后,将物体旋转回之前的位置。具体做法是乘以之前矩阵的逆矩阵。至此,我们得到物体旋转所需要的最终矩阵: \[ R(\theta)=R_z(-\psi)R_y(-\phi)R_z(\theta)R_y(\phi)R_z(\psi) \] 利用旋转矩阵的性质:\(R(-\alpha)=R^{-1}(\alpha)=R^T(\alpha)\),我们也可以写成: \[ R(\theta)=R_z^T(\psi)R_y^T(\phi)R_z(\theta)R_y(\phi)R_z(\psi) \]
绕不通过原点的直线旋转
有了上面的基础作铺垫,这种情况将变得十分简单。只要将旋转轴平移到经过原点的位置,那么问题就转换成上面的情况,最后再平移回去就可以了。因此,变换矩阵只是在上一种情况的基础上,乘上平移矩阵: \[ R(\theta)=T(x_1, y_1, z_1)R_z^T(\psi)R_y^T(\phi)R_z(\theta)R_y(\phi)R_z(\psi)T(-x_1, -y_1, -z_1) \]
参考
- Interactive Computer Graphics - A Top-Down Approach 6e By Edward Angel and Dave Shreiner (Pearson, 2012)
- 三维空间中的旋转:旋转矩阵、欧拉角